












混沌を明確さに変換する。ビジョンから納品まで—視覚化し、優先順位を付け、自信を持って提供する。
🔍 はじめに:なぜストーリーマッピングなのか?
アジャイル環境では、チームはしばしば以下の課題に直面する。バックログの混沌—文脈や優先順位、ユーザー中心の視点を欠いた、平坦で構造のないタスクやストーリーのリスト。これにより、努力がずれ、スコープの拡大、価値の提供遅延が生じる。
登場するストーリーマッピング—ユーザーの体験を物語として可視化することで、製品開発に構造、明確さ、協働をもたらす強力なアジャイル手法。
✅ ストーリーマッピングは、抽象的なバックログを、ユーザー価値の明確で優先順位付けされたロードマップに変える。
そしてビジュアルパラダイム、ストーリーマッピングは単なる一回限りのワークショップの演習ではなく、スクラムワークフローの生き生きとした統合された一部、計画、実行、納品とスムーズに連携する。
🧭 ユーザーストーリーマッピングとは何か?
ユーザーストーリーマッピングは、ユーザーのストーリーを2つの次元に沿って整理する視覚的手法である。
| 軸 | 目的 |
|---|---|
| 水平方向(X軸) | そのユーザーの体験—ユーザーが達成する活動や目標の順序(例:「閲覧 → 選択 → カートへ → 支払い」)。これが製品の骨格となる。 |
| 垂直方向(Y軸) | 優先順位付けとリリース計画 – 各アクティビティをエピック、ユーザーストーリー、タスクに分解し、重要度、複雑さ、リリーススケジュールに基づいて順序付けする。 |
これにより、「トップダウン」型の物語マップが回答するもの:
-
ユーザーが達成したいことは何か?
-
どのような順序で?
-
今と将来で、何が必須で何が後回しか?
-
どこにギャップがあるか?
🎯 目的: 段階的に価値を提供し、ステークホルダーを一致させ、ユーザーのニーズに焦点を当てる。
🛠️ Visual Paradigmがストーリーマッピングでアジャイルチームをどのように支援するか
Visual Paradigmは、完全統合型で企業向けのプラットフォーム アジャイルチームがストーリーマッピングを効果的に実践できるようにするものであり、ビジョンを実行に変える際に最小限の摩擦で実現できる。
4つのコア機能を通じて、それがどのように機能するかを確認しましょう。
✅ 1. 専用のユーザーストーリーマッピングインターフェース
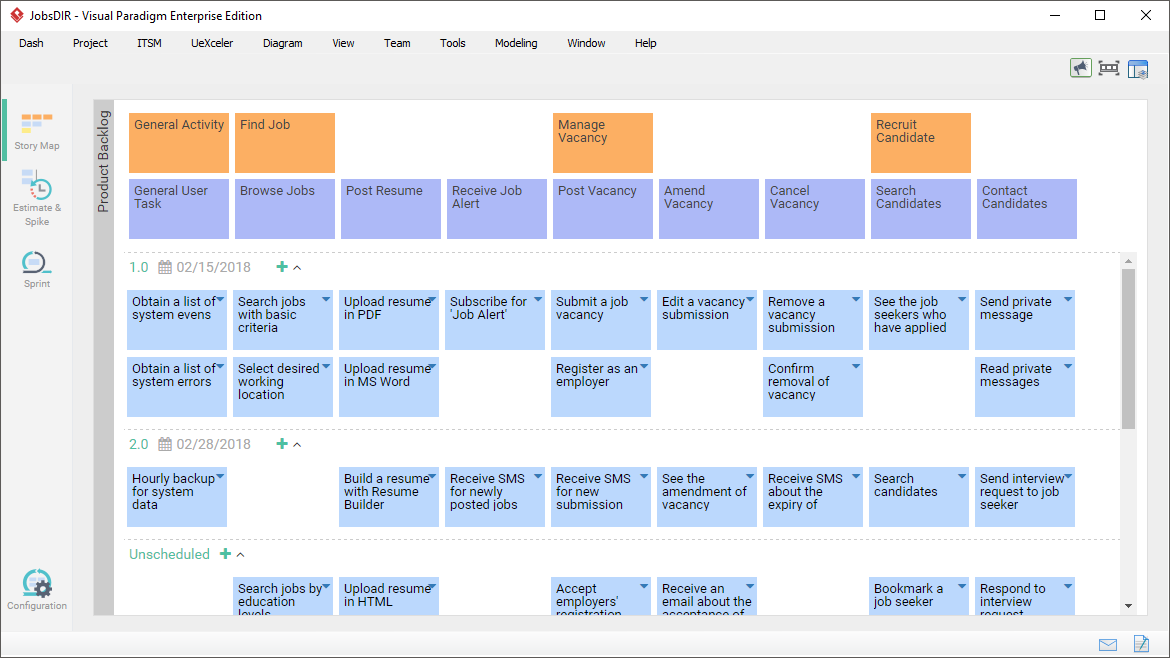
Visual Paradigmは、目的に応じて設計されたユーザーストーリーマップキャンバス を提供しており、階層構造(3~4段階)をサポートしており、明確で実行可能な製品ロードマップの構築を容易にする。
📊 ストーリーマップの構造(階層レベル)
| レベル | 説明 | 例 |
|---|---|---|
| 1. ユーザーアクティビティ(骨格) | ユーザーの高レベルな目標、または旅のステップ。 | 「製品を閲覧する」、「カートに追加する」、「チェックアウトする」、「注文を受け取る」 |
| 2. ユーザータスク | 各アクティビティ内の特定のアクション。 | 「アイテムを検索する」、「価格で絞り込む」、「製品詳細を表示する」 |
| 3. エピック(オプション) | 大きな機能やテーマ。 | 「検索機能を実装する」 |
| 4. ユーザーストーリー | 価値の小さな、テスト可能な単位。 | 「ショッパーとして、価格で製品を絞り込めるようにしたい。そうすれば手頃な選択肢を見つけることができる。」 |
💡 主な機能:
-
ドラッグアンドドロップによる並べ替え用動的優先順位付け.
-
ストーリーのインライン編集(タイトル、説明、受入基準)。
-
対応機能:ワイヤーフレーム、添付ファイル、メモ、見積もり.
-
視覚的な整合性:リリーススライス(今/次/後で)。
🎯 メリット:フラットなバックログを、各スプリントを導く戦略的でユーザー中心のロードマップに変換する。
✅ 2. スクラムプロセスキャンバスとのシームレスな統合
そのスクラムプロセスキャンバスはVisual Paradigmの1ページのアジャイルダッシュボードスクラムのすべてのアーティファクト——ビジョン、プロダクトバックログ、スプリントプランニング、バーンダウンチャート、リトロスペクティブなど——を統合するものです。

🔗 ストーリーマッピングの位置づけ:
-
そのユーザーストーリーマップは、スクラムプロセスキャンバスに直接埋め込まれています。
-
あなたはマップからストーリーをスプリントバックログにドラッグできるワンクリックで可能です。
-
リアルタイムでの更新が以下の箇所で同期されます:
-
スプリントプランニング
-
デイリースタンドアップ
-
バーンダウンチャート
-
障害追跡
-
リトロスペクティブノート
-
🔄 ツールの切り替えはもうありません。すべての情報が文脈の中で維持されます。
🛠️ 実践的なワークフロー:
-
まずユーザージャーニー(水平軸)。
-
以下に分解します:タスクとストーリー(垂直軸)。
-
以下の「今・次・後」のラベルを使って優先順位を付ける「今・次・後」のレーン.
-
選択したストーリーを現在のスプリントスクラムキャンバスにドラッグします。
-
進捗を次で追跡する:バーンダウンチャートおよび障害ログ.
✅ 結果:ビジョン → バックログ → スプリント → デリバリーへの連続的な流れ。
✅ 3. コラボレーションと生産性向上機能
Visual Paradigmは、チームコラボレーション共同作業環境でも、分散型でも対応可能。
🎯 主な機能:
| 機能 | 利点 |
|---|---|
| ドラッグアンドドロップによる並べ替え | ストーリーの並べ替え、リリースの分割、優先順位のリアルタイム調整が簡単。 |
| インライン編集 | マップから離れることなく、タイトル、受入基準、メモ、添付ファイルを編集可能。 |
| 親和性推定(プランニングポーカー) | 視覚的なグループ化を使って、共同でストーリーポイントを推定。 |
| AI駆動のストーリー生成 (v2024+で新機能) | 要件やユースケース、さらには自然言語入力からもユーザー・ストーリーを生成可能。 |
| クラウド版(VP Online)とデスクトップ版 | どこからでも作業可能—リモートチームに最適。 |
| エクスポートとドキュメント作成 | ステークホルダーとの共有のために、ストーリーマップをPDF、PNG、またはHTML形式でエクスポート可能。 |
| バージョン管理と監査ログ | スプリント間で変更を追跡し、トレーサビリティを維持する。 |
🤝 以下に適しています:プロダクトオーナー、スクラムマスター、開発者、QA、UXデザイナー、ステークホルダー。
✅ 4. 可視化から実際の実行への橋渡し
ストーリーマッピングの最大の落とし穴の一つは、それを 「美しい絵」ワークショップ後に使われないものにすることだ。
Visual Paradigm このギャップを解消するストーリーマッピングを 実行可能でトレーサブルなものにする.
🔄 どうやって動くのか:
-
ストーリーマップ → スプリントバックログ:ストーリーを直接スプリント計画にドラッグする。
-
ストーリー → タスク:ユーザー ストーリーを実行可能なタスクに展開する。
-
タスク → 担当:期日を設定してチームメンバーに割り当てる。
-
進捗 → バーンダウンチャート:完了したタスクに基づいて自動更新される。
-
依存関係 → 視覚的アラート:スプリント間の依存関係を早期に発見する。
🎯 成果:ストーリーマップは単なる計画ツールではない。それは 真実の出所全スプリントにおける真実の出所である。
🧩 Visual Paradigmにおける効果的なストーリーマッピングのベストプラクティス
| ヒント | なぜ効果的なのか |
|---|---|
| ユーザーの旅路から始める – まず骨格を定義する。 | ユーザー価値に注力することを保証し、技術的機能に偏らない。 |
| スプリント中にマップを可視化し続ける – スプリントルームまたは共有作業スペースに表示する。 | チームの整合性と文脈を維持する。 |
| 「今/次/後」のラベルを活用する リリースを分割するために。 | 段階的な配信と明確なロードマップの共有を可能にする。 |
| クロスファンクショナルチームを参加させる マッピングに参加させる(PO、開発者、QA、UX)。 | 多様な視点をもたらし、盲点を減らす。 |
| スプリントごとにマップを確認・更新する – それは生きているアーティファクトである。 | フィードバックや市場の変化に応じて製品が進化し続ける。 |
🚀 Visual Paradigmが際立つ理由
| 機能 | なぜ重要なのか |
|---|---|
| ワンストップのアジャイルプラットフォーム | 複数のツール(Jira、Confluence、Trelloなど)を切り替えながら使う必要がない。 |
| BPMN、ユースケース、ワイヤーフレームとのシームレスな統合 | 既存のモデルを再利用して、ストーリーマッピングを迅速に開始する。 |
| AI搭載のストーリー生成 | 要件からバックログ作成を加速する。 |
| リアルタイム共同作業 | 時差を越えて働く分散チームに最適です。 |
| 企業向けにスケーラブル | カスタマイズ可能なテンプレートで、大規模なアジャイル(SAFe、LeSS、Nexus)をサポートします。 |
📌 スタートガイド:今日からVisual Paradigmを試してみましょう
混沌から明確さへと移行する準備はできていますか?
🔹 ステップ1:ダウンロードまたはアクセス
-
デスクトップアプリ: Visual Paradigmをダウンロード
-
クラウド(VP Online): VP Onlineで無料トライアルを開始
🔹 ステップ2:新しいプロジェクトを作成
-
選択してください アジャイル > ユーザーストーリーマッピング.
-
または以下から開始 スクラムプロセスキャンバス (完全統合を希望する場合に推奨)
🔹 ステップ3:ストーリーマップの構築
-
定義: ユーザーの活動 (水平軸)。
-
以下に分割: タスク.
-
追加するエピックとユーザーストーリー.
-
ドラッグアンドドロップで優先順位を設定する。
-
使用する「今/次/後で」リリース計画用のレーン。
🔹 ステップ4:スクラムキャンバスに接続する
-
開くスクラムプロセスキャンバス.
-
マップからストーリーをドラッグして、スプリントバックログ.
-
スプリント、バーンダウン、障害の追跡を開始する。
🏁 結論:一歩ずつ、混沌から明確さへ
ストーリーマッピングは計画手法以上のものである—それはマインドセットの転換ユーザー中心の提供へ向かう
によりVisual Paradigm、ストーリーマッピングはこうなる
-
✅ 視覚的で直感的
-
✅ スクラムと統合済み
-
✅ 協働的でダイナミック
-
✅ 実行可能で追跡可能
それは抽象的なアイデアを 明確で優先順位が付けられた価値への道筋チームがより速く成果を出すのを助け、混乱を減らし、ステークホルダーの合意を高めます。
🌟 最終的な考察:
「単に仕事の計画をするのではなく、ユーザーの旅路をマッピングしましょう。すべてのストーリーが大きな物語の一部を語るようにしましょう。」
📚 リソースとさらに学ぶための読書
- ユーザーストーリーマッピングの包括的ガイド:このガイドは、 ユーザーストーリーマップを作成し、使用する方法を説明します製品開発を可視化し、チームを統一し、機能の優先順位を効果的に付けるために使用します。リリース計画の際に、チームがユーザー全体の旅路を理解するための視覚的フレームワークを提供します。
- ユーザーストーリーマッピングとは何か? ビギナー向けガイド:この入門用リソースは、 目的と利点アジャイルソフトウェア開発におけるユーザーストーリーマッピングの 。この手法が製品発見を支援し、チームがフラットなバックログリストの枠を越えていくのを助けることを強調しています。
- スクラムプロセスキャンバス – アジャイルプロジェクトマネジメントフレームワーク:このリソースは、 構造化されたキャンバススクラム手法を用いたアジャイルプロジェクトの管理に設計されたものです。スプリント計画、バックログの精査、チームの整合性維持といった必須活動を、1つのインターフェース内で容易にします。
- スクラムでストーリーマップを使ってユーザーストーリーを管理する方法:この実践的なガイドは、ストーリーマップを使って 整理・優先順位付け・管理するスクラムフレームワーク内でユーザーストーリーを管理することに焦点を当てます。製品所有者が明確で実行可能な製品バックログを維持するのを支援します。
- スクラムプロセスキャンバス – プロジェクト開始ガイド: ステップバイステップガイド: スクラムプロセスキャンバス 効果的なプロジェクト開始のため。チームが協働型のアジャイル環境でプロジェクトの目標、役割、納品物を定義するのを支援します。
- Visual Paradigm:ユーザーストーリーマッピングツールツアー: このツアーでは 専用のユーザーストーリーマッピング機能 Visual Paradigmプラットフォームで利用可能な機能について紹介します。アジャイルチームがワークフローを可視化し、単一の統合環境で製品リリースを計画する方法を示します。
- スクラムプロセスキャンバスを活用したスプリントの開始方法: この記事では スプリントの開始 キャンバスを活用した方法について説明します。計画と目標設定に重点を置き、作業を開始する前にチームがスプリントバックログについて合意していることを保証します。
- スクラムプロセスキャンバスを活用したスプリント管理: 深く掘り下げるリソース: スプリントライフサイクル全体の管理 スクラムプロセスキャンバスを活用した方法について。スプリントの追跡、レビュー会議、リトロスペクティブを通じた継続的改善を含む重要な活動をカバーしています。
- ユーザーストーリーマップを活用した製品バックログの管理: このガイドでは、どのように 優先順位と構造を最適化するか マッピング技術を活用して製品バックログを最適化する方法を説明します。チームが反復の計画を明確にし、最も価値の高い機能を提供できることを保証します。
- 生産性向上のためのアジャイルユーザーストーリーマッピングツール: この記事では、専用のアジャイルツールが 生産性と効率性を最大化する方法 スクラムプロジェクトの 。視覚的なマッピングを通じた効果的なバックログ管理とリリース計画の重要性を強調しています。
📌 プロのヒント:
👉 今日からVisual Paradigmの無料トライアルを試してみましょう 1つのツールが、ストーリーマッピングからスプリント納品まで、あなたのアジャイルな旅を統合する方法を体験しましょう。
🔄 アジャイルを保ちましょう。可視化を保ちましょう。コントロールを保ちましょう。
Visual Paradigm – 明快さのためのあなたのアジャイルパートナー